ES详解 - 原理:ES原理之索引文档流程详解
ES详解 - 原理:ES原理之索引文档流程详解
ElasticSearch中最重要原理是文档的索引和文档的读取,本文带你理解ES文档的索引过程。
1. 文档索引步骤顺序
1.1 单个文档
新建单个文档所需要的步骤顺序:
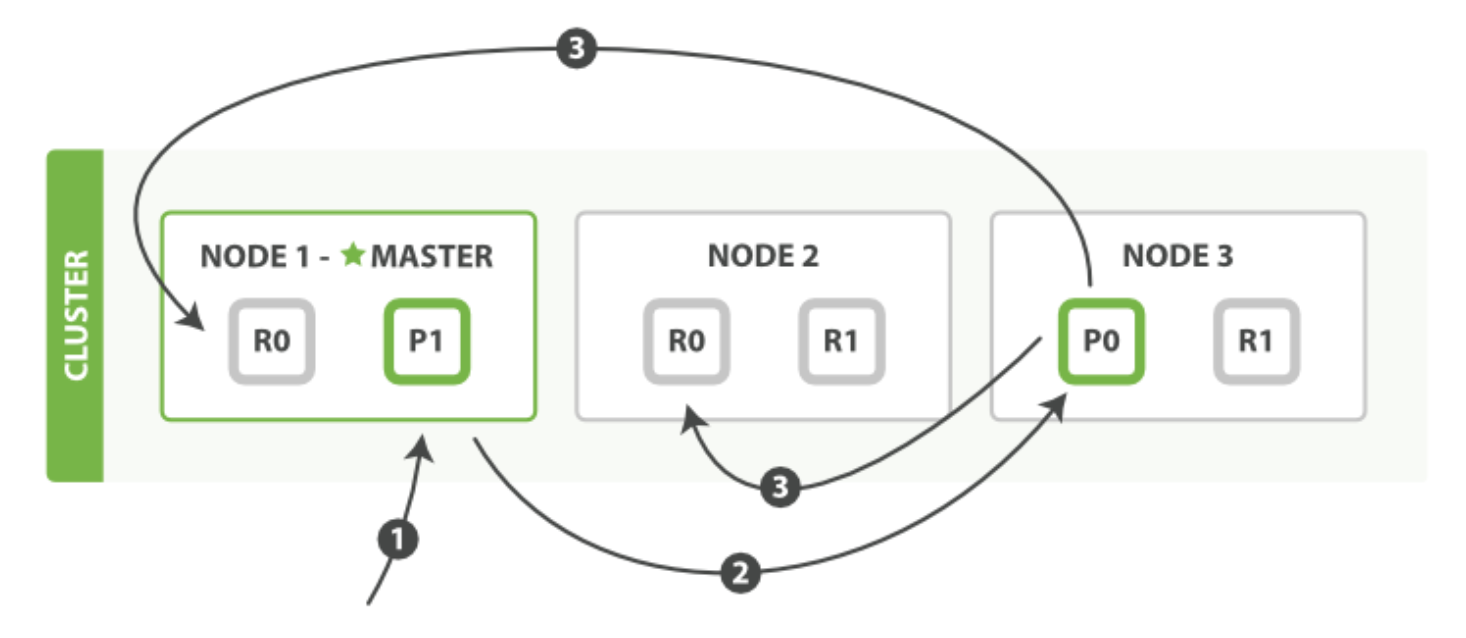
- 客户端向 Node 1 发送新建、索引或者删除请求。
- 节点使用文档的 _id 确定文档属于分片 0 。请求会被转发到 Node 3,因为分片 0 的主分片目前被分配在 Node 3 上。
- Node 3 在主分片上面执行请求。如果成功了,它将请求并行转发到 Node 1 和 Node 2 的副本分片上。一旦所有的副本分片都报告成功, Node 3 将向协调节点报告成功,协调节点向客户端报告成功。
1.2 多个文档
使用 bulk 修改多个文档步骤顺序:
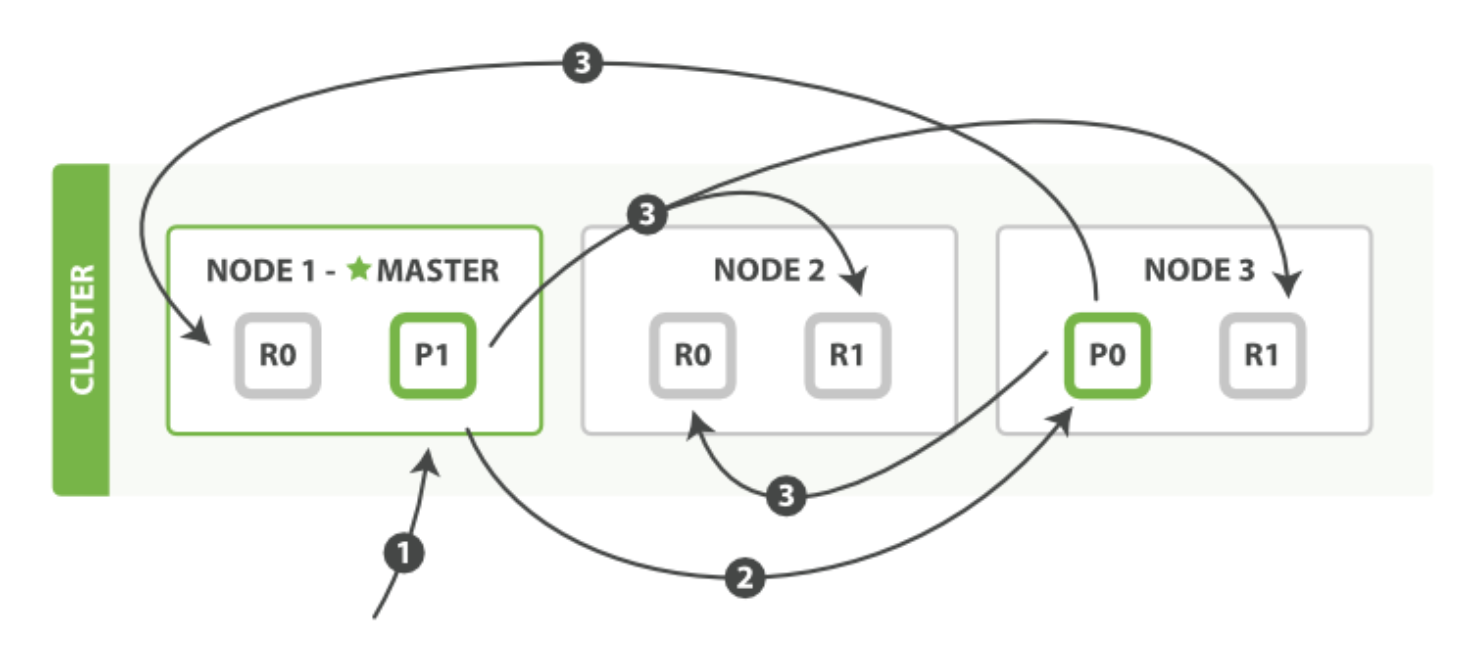
- 客户端向 Node 1 发送 bulk 请求。
- Node 1 为每个节点创建一个批量请求,并将这些请求并行转发到每个包含主分片的节点主机。
- 主分片一个接一个按顺序执行每个操作。当每个操作成功时,主分片并行转发新文档(或删除)到副本分片,然后执行下一个操作。 一旦所有的副本分片报告所有操作成功,该节点将向协调节点报告成功,协调节点将这些响应收集整理并返回给客户端。
2. 文档索引过程详解
2.1整体的索引流程
先看下整体的索引流程
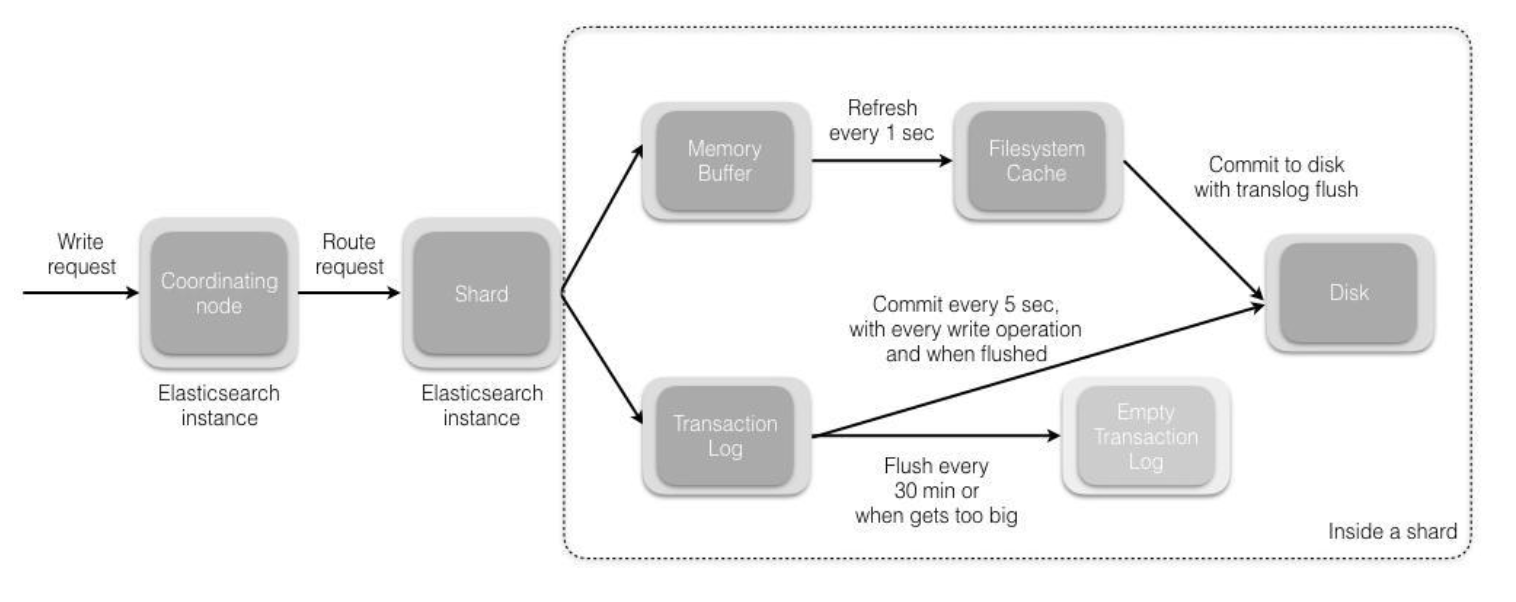
- 协调节点默认使用文档ID参与计算(也支持通过routing),以便为路由提供合适的分片。
shard = hash(document_id) % (num_of_primary_shards)
- 当分片所在的节点接收到来自协调节点的请求后,会将请求写入到Memory Buffer,然后定时(默认是每隔1秒)写入到Filesystem Cache,这个从Momery Buffer到Filesystem Cache的过程就叫做refresh;
- 当然在某些情况下,存在Momery Buffer和Filesystem Cache的数据可能会丢失,ES是通过translog的机制来保证数据的可靠性的。其实现机制是接收到请求后,同时也会写入到translog中,当Filesystem cache中的数据写入到磁盘中时,才会清除掉,这个过程叫做flush。
- 在flush过程中,内存中的缓冲将被清除,内容被写入一个新段,段的fsync将创建一个新的提交点,并将内容刷新到磁盘,旧的translog将被删除并开始一个新的translog。 flush触发的时机是定时触发(默认30分钟)或者translog变得太大(默认为512M)时。
2.2 分步骤看数据持久化过程
通过分步骤看数据持久化过程:write -> refresh -> flush -> merge
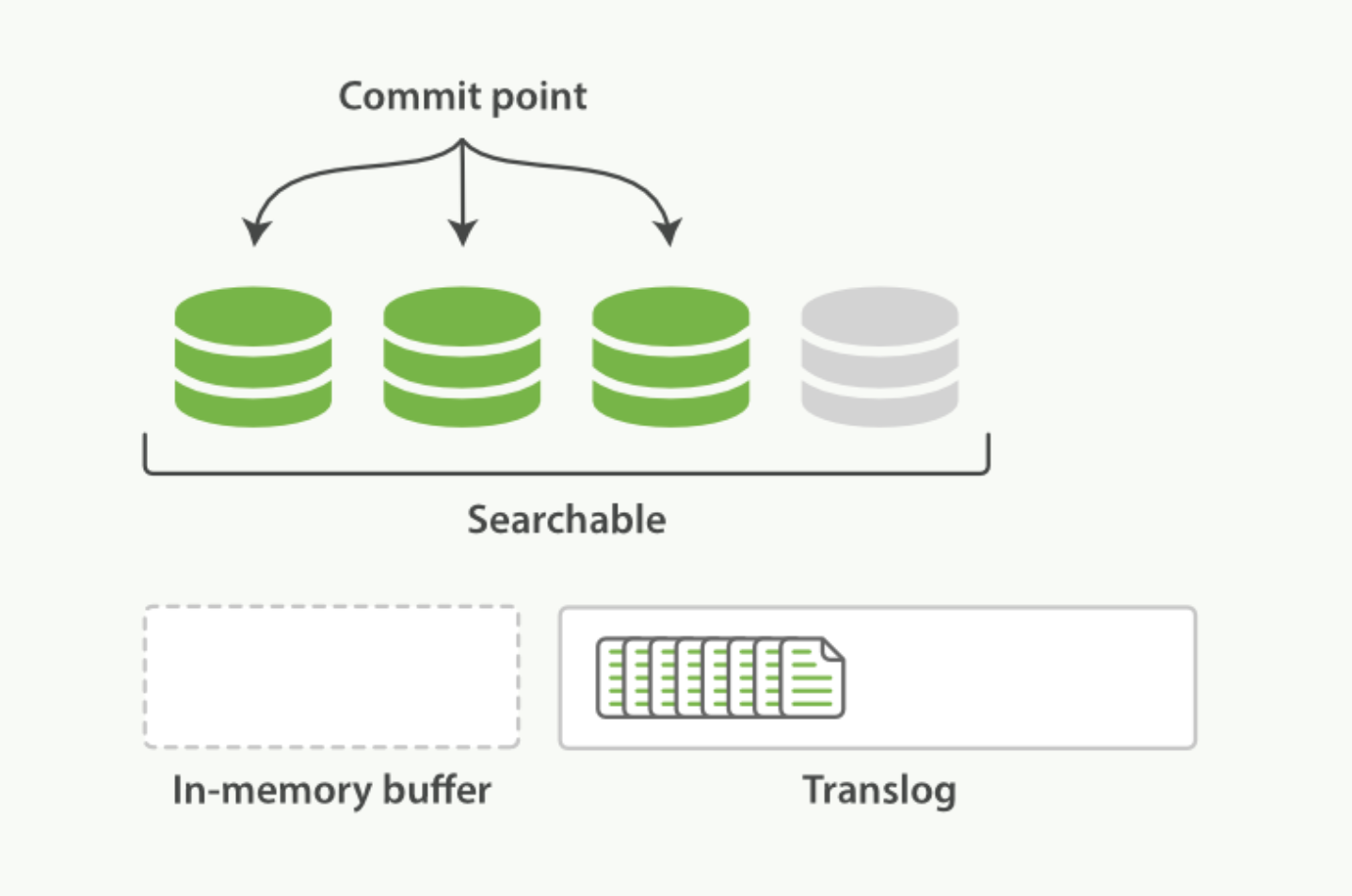
- write 过程
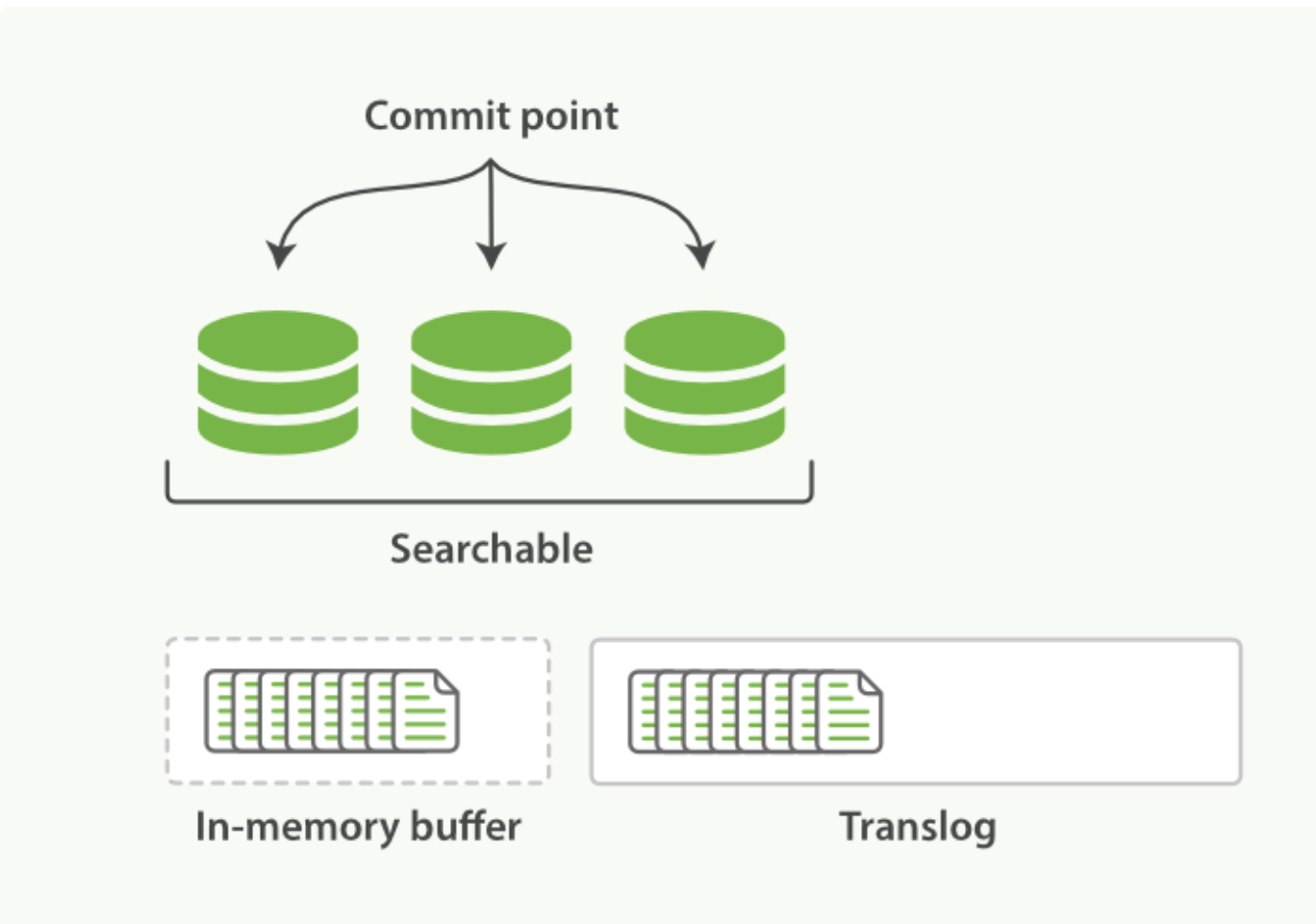
一个新文档过来,会存储在 in-memory buffer 内存缓存区中,顺便会记录 Translog(Elasticsearch 增加了一个 translog ,或者叫事务日志,在每一次对 Elasticsearch 进行操作时均进行了日志记录)。
这时候数据还没到 segment ,是搜不到这个新文档的。数据只有被 refresh 后,才可以被搜索到。
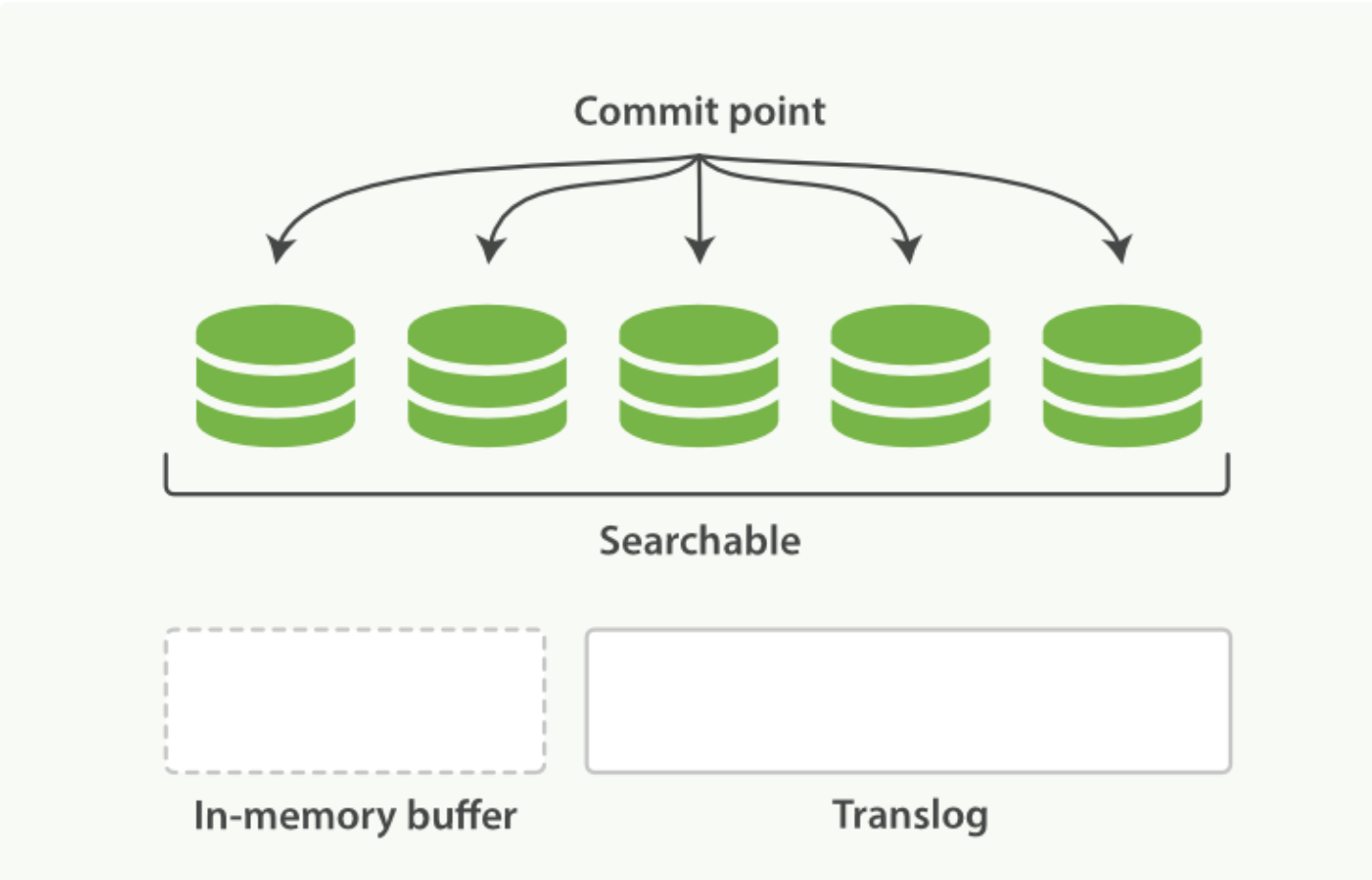
- refresh 过程
refresh 默认 1 秒钟,执行一次上图流程。ES 是支持修改这个值的,通过 index.refresh_interval 设置 refresh (冲刷)间隔时间。refresh 流程大致如下:
- in-memory buffer 中的文档写入到新的 segment 中,但 segment 是存储在文件系统的缓存中。此时文档可以被搜索到
- 最后清空 in-memory buffer。注意: Translog 没有被清空,为了将 segment 数据写到磁盘
- 文档经过 refresh 后, segment 暂时写到文件系统缓存,这样避免了性能 IO 操作,又可以使文档搜索到。refresh 默认 1 秒执行一次,性能损耗太大。一般建议稍微延长这个 refresh 时间间隔,比如 5 s。因此,ES 其实就是准实时,达不到真正的实时。
- flush 过程
每隔一段时间—例如 translog 变得越来越大—索引被刷新(flush);一个新的 translog 被创建,并且一个全量提交被执行
上个过程中 segment 在文件系统缓存中,会有意外故障文档丢失。那么,为了保证文档不会丢失,需要将文档写入磁盘。那么文档从文件缓存写入磁盘的过程就是 flush。写入磁盘后,清空 translog。具体过程如下:
- 所有在内存缓冲区的文档都被写入一个新的段。
- 缓冲区被清空。
- 一个Commit Point被写入硬盘。
- 文件系统缓存通过 fsync 被刷新(flush)。
- 老的 translog 被删除。
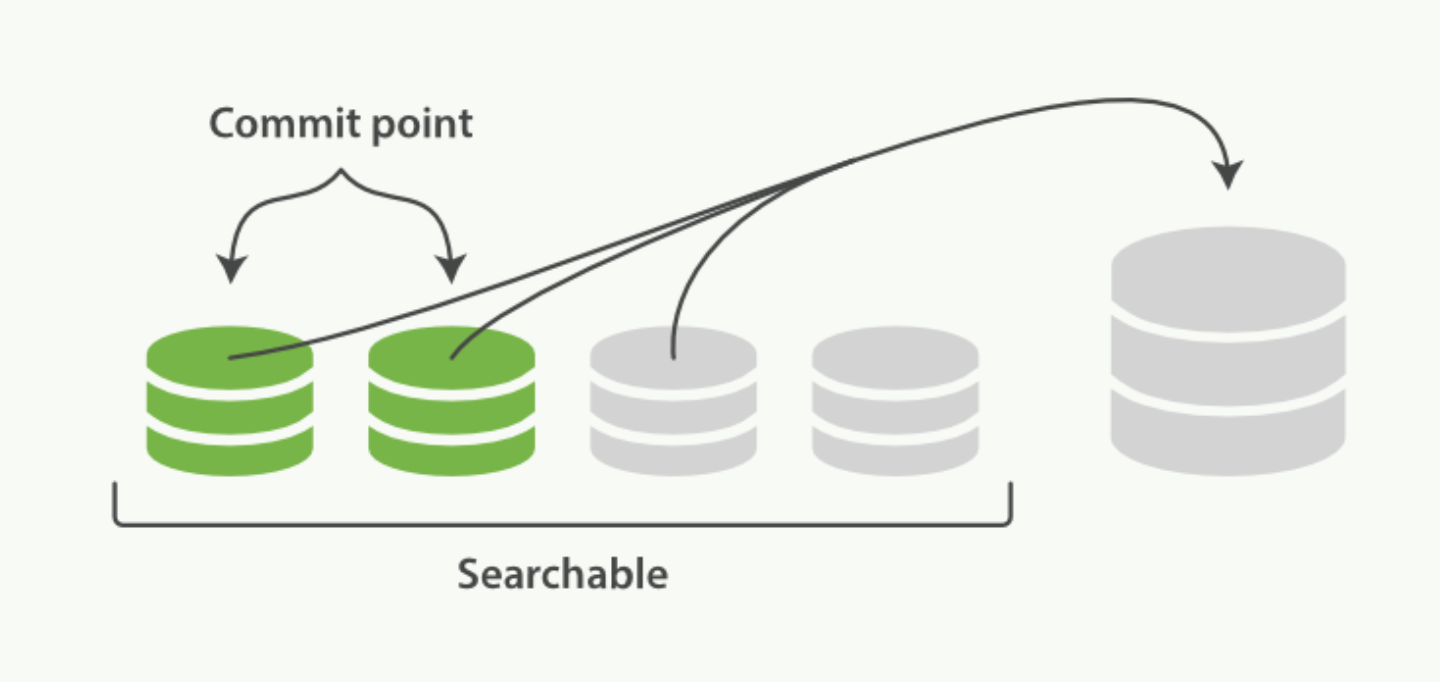
- merge 过程
由于自动刷新流程每秒会创建一个新的段 ,这样会导致短时间内的段数量暴增。而段数目太多会带来较大的麻烦。 每一个段都会消耗文件句柄、内存和cpu运行周期。更重要的是,每个搜索请求都必须轮流检查每个段;所以段越多,搜索也就越慢。
Elasticsearch通过在后台进行Merge Segment来解决这个问题。小的段被合并到大的段,然后这些大的段再被合并到更大的段。
当索引的时候,刷新(refresh)操作会创建新的段并将段打开以供搜索使用。合并进程选择一小部分大小相似的段,并且在后台将它们合并到更大的段中。这并不会中断索引和搜索。
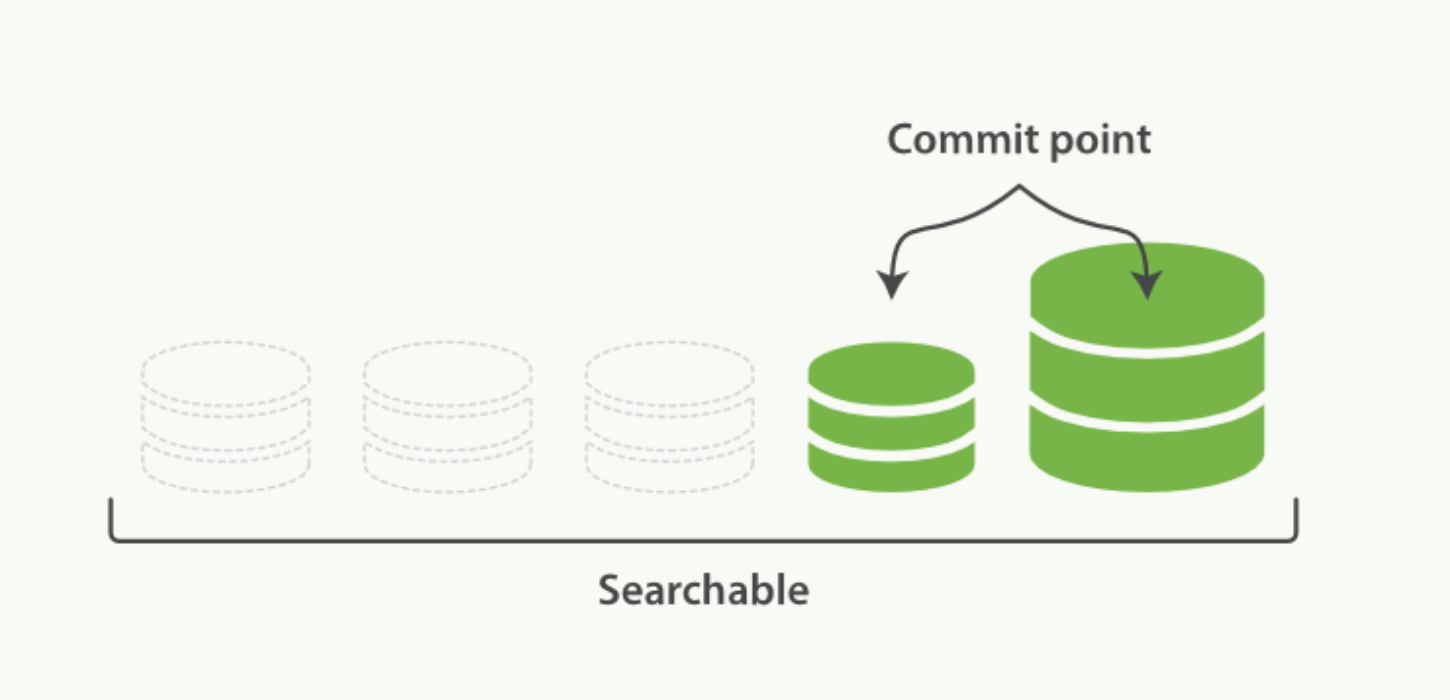
一旦合并结束,老的段被删除:
- 新的段被刷新(flush)到了磁盘。写入一个包含新段且排除旧的和较小的段的新提交点。
- 新的段被打开用来搜索。
- 老的段被删除。
合并大的段需要消耗大量的I/O和CPU资源,如果任其发展会影响搜索性能。Elasticsearch在默认情况下会对合并流程进行资源限制,所以搜索仍然 有足够的资源很好地执行。
3. 深入ElasticSearch索引文档的实现机制
TIP
作为选读内容。
3.1 写操作的关键点
在考虑或分析一个分布式系统的写操作时,一般需要从下面几个方面考虑:
- 可靠性:或者是持久性,数据写入系统成功后,数据不会被回滚或丢失。
- 一致性:数据写入成功后,再次查询时必须能保证读取到最新版本的数据,不能读取到旧数据。
- 原子性:一个写入或者更新操作,要么完全成功,要么完全失败,不允许出现中间状态。
- 隔离性:多个写入操作相互不影响。
- 实时性:写入后是否可以立即被查询到。
- 性能:写入性能,吞吐量到底怎么样。
Elasticsearch作为分布式系统,也需要在写入的时候满足上述的四个特点,我们在后面的写流程介绍中会涉及到上述四个方面。
接下来,我们一层一层剖析Elasticsearch内部的写机制。
3.2 Lucene的写
众所周知,Elasticsearch内部使用了Lucene完成索引创建和搜索功能,Lucene中写操作主要是通过IndexWriter类实现,IndexWriter提供三个接口:
public long addDocument();
public long updateDocuments();
public long deleteDocuments();
通过这三个接口可以完成单个文档的写入,更新和删除功能,包括了分词,倒排创建,正排创建等等所有搜索相关的流程。只要Doc通过IndesWriter写入后,后面就可以通过IndexSearcher搜索了,看起来功能已经完善了,但是仍然有一些问题没有解:
- 上述操作是单机的,而不是我们需要的分布式。
- 文档写入Lucene后并不是立即可查询的,需要生成完整的Segment后才可被搜索,如何保证实时性?
- Lucene生成的Segment是在内存中,如果机器宕机或掉电后,内存中的Segment会丢失,如何保证数据可靠性 ?
- Lucene不支持部分文档更新,但是这又是一个强需求,如何支持部分更新?
上述问题,在Lucene中是没有解决的,那么就需要Elasticsearch中解决上述问题。
我们再来看Elasticsearch中的写机制。
3.3 Elasticsearch的写
Elasticsearch采用多Shard方式,通过配置routing规则将数据分成多个数据子集,每个数据子集提供独立的索引和搜索功能。当写入文档的时候,根据routing规则,将文档发送给特定Shard中建立索引。这样就能实现分布式了。
此外,Elasticsearch整体架构上采用了一主多副的方式:
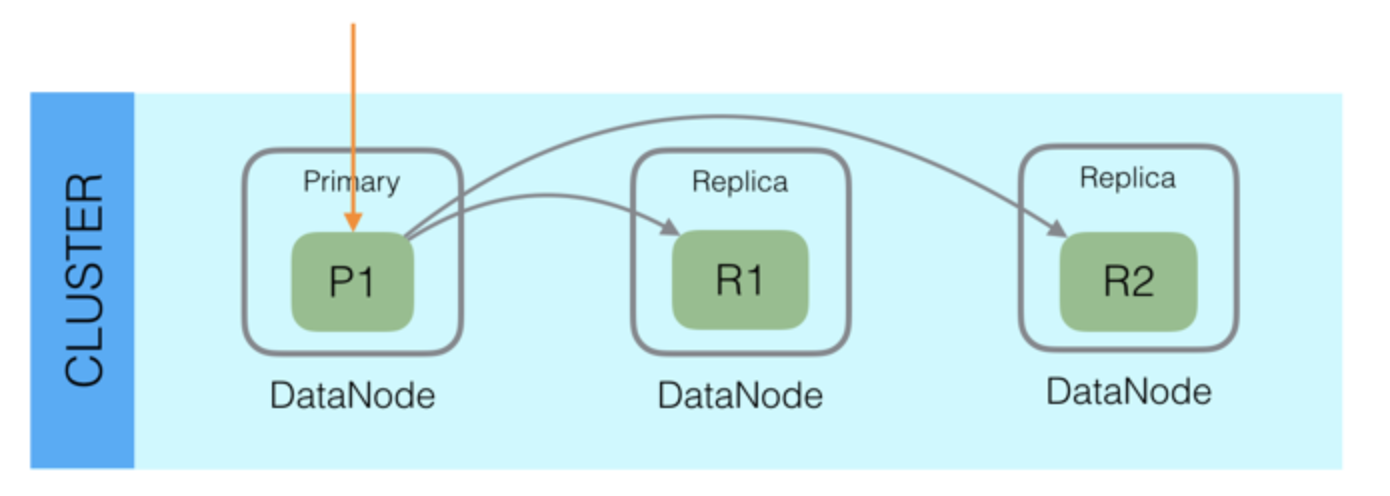
每个Index由多个Shard组成,每个Shard有一个主节点和多个副本节点,副本个数可配。但每次写入的时候,写入请求会先根据_routing规则选择发给哪个Shard,Index Request中可以设置使用哪个Filed的值作为路由参数,如果没有设置,则使用Mapping中的配置,如果mapping中也没有配置,则使用_id作为路由参数,然后通过_routing的Hash值选择出Shard(在OperationRouting类中),最后从集群的Meta中找出出该Shard的Primary节点。
请求接着会发送给Primary Shard,在Primary Shard上执行成功后,再从Primary Shard上将请求同时发送给多个Replica Shard,请求在多个Replica Shard上执行成功并返回给Primary Shard后,写入请求执行成功,返回结果给客户端。
这种模式下,写入操作的延时就等于latency = Latency(Primary Write) + Max(Replicas Write)。只要有副本在,写入延时最小也是两次单Shard的写入时延总和,写入效率会较低,但是这样的好处也很明显,避免写入后,单机或磁盘故障导致数据丢失,在数据重要性和性能方面,一般都是优先选择数据,除非一些允许丢数据的特殊场景。
采用多个副本后,避免了单机或磁盘故障发生时,对已经持久化后的数据造成损害,但是Elasticsearch里为了减少磁盘IO保证读写性能,一般是每隔一段时间(比如5分钟)才会把Lucene的Segment写入磁盘持久化,对于写入内存,但还未Flush到磁盘的Lucene数据,如果发生机器宕机或者掉电,那么内存中的数据也会丢失,这时候如何保证?
对于这种问题,Elasticsearch学习了数据库中的处理方式:增加CommitLog模块,Elasticsearch中叫TransLog。
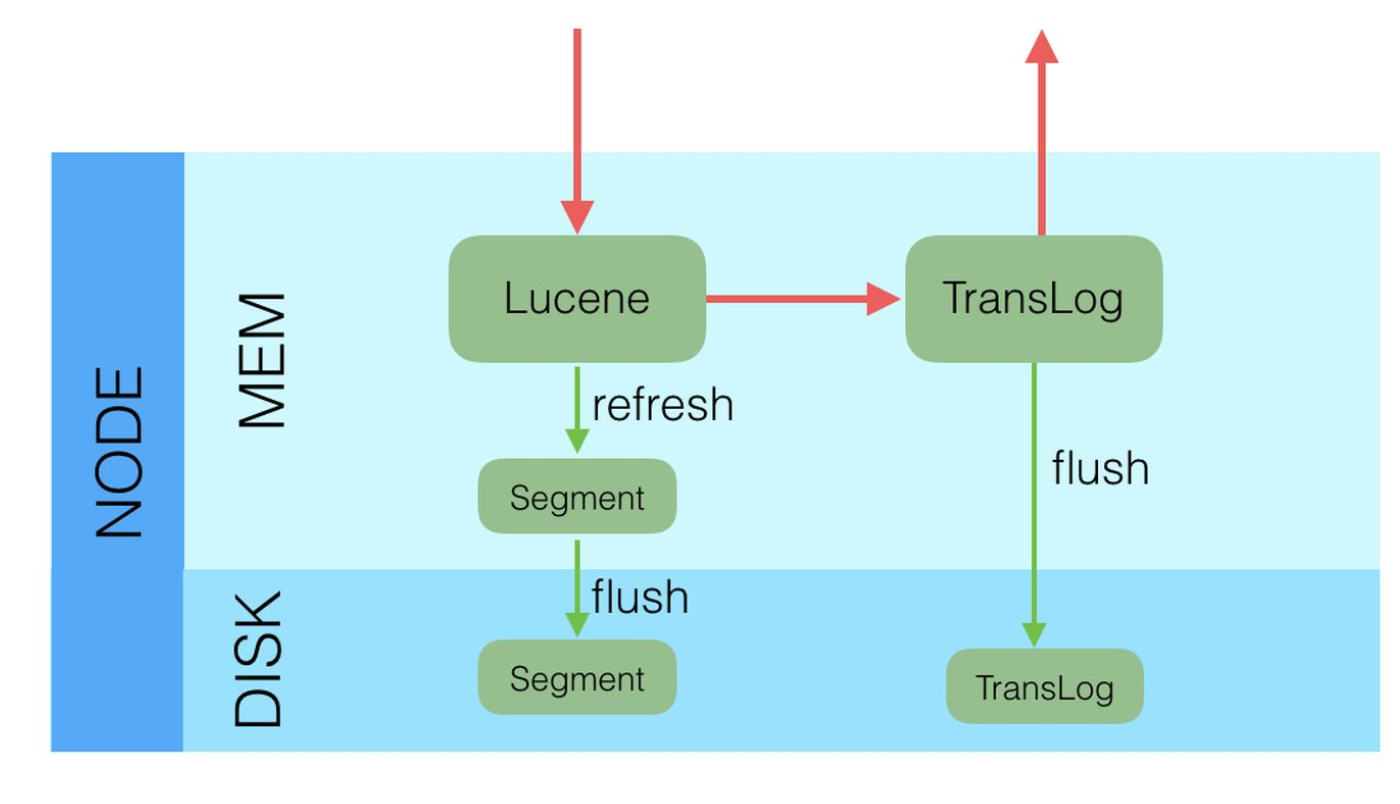
在每一个Shard中,写入流程分为两部分,先写入Lucene,再写入TransLog。
写入请求到达Shard后,先写Lucene文件,创建好索引,此时索引还在内存里面,接着去写TransLog,写完TransLog后,刷新TransLog数据到磁盘上,写磁盘成功后,请求返回给用户。这里有几个关键点:
- 一是和数据库不同,数据库是先写CommitLog,然后再写内存,而Elasticsearch是先写内存,最后才写TransLog,一种可能的原因是Lucene的内存写入会有很复杂的逻辑,很容易失败,比如分词,字段长度超过限制等,比较重,为了避免TransLog中有大量无效记录,减少recover的复杂度和提高速度,所以就把写Lucene放在了最前面。
- 二是写Lucene内存后,并不是可被搜索的,需要通过Refresh把内存的对象转成完整的Segment后,然后再次reopen后才能被搜索,一般这个时间设置为1秒钟,导致写入Elasticsearch的文档,最快要1秒钟才可被从搜索到,所以Elasticsearch在搜索方面是NRT(Near Real Time)近实时的系统。
- 三是当Elasticsearch作为NoSQL数据库时,查询方式是GetById,这种查询可以直接从TransLog中查询,这时候就成了RT(Real Time)实时系统。四是每隔一段比较长的时间,比如30分钟后,Lucene会把内存中生成的新Segment刷新到磁盘上,刷新后索引文件已经持久化了,历史的TransLog就没用了,会清空掉旧的TransLog。
上面介绍了Elasticsearch在写入时的两个关键模块,Replica和TransLog,接下来,我们看一下Update流程:
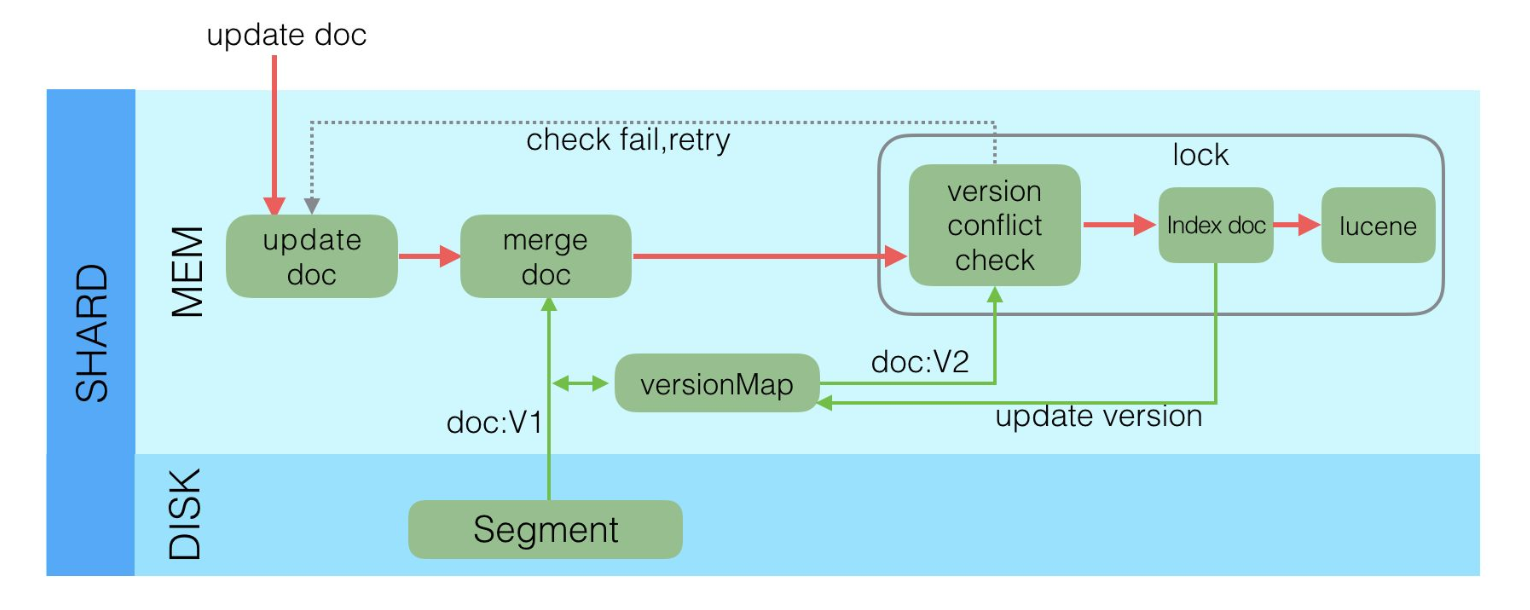
Lucene中不支持部分字段的Update,所以需要在Elasticsearch中实现该功能,具体流程如下:
- 收到Update请求后,从Segment或者TransLog中读取同id的完整Doc,记录版本号为V1。
- 将版本V1的全量Doc和请求中的部分字段Doc合并为一个完整的Doc,同时更新内存中的VersionMap。获取到完整Doc后,Update请求就变成了Index请求。 加锁。
- 再次从versionMap中读取该id的最大版本号V2,如果versionMap中没有,则从Segment或者TransLog中读取,这里基本都会从versionMap中获取到。
- 检查版本是否冲突(V1==V2),如果冲突,则回退到开始的“Update doc”阶段,重新执行。如果不冲突,则执行最新的Add请求。
- 在Index Doc阶段,首先将Version + 1得到V3,再将Doc加入到Lucene中去,Lucene中会先删同id下的已存在doc id,然后再增加新Doc。写入Lucene成功后,将当前V3更新到versionMap中。
- 释放锁,部分更新的流程就结束了。
介绍完部分更新的流程后,大家应该从整体架构上对Elasticsearch的写入有了一个初步的映象,接下来我们详细剖析下写入的详细步骤。
3.4 Elasticsearch写入请求类型
Elasticsearch中的写入请求类型,主要包括下列几个:Index(Create),Update,Delete和Bulk,其中前3个是单文档操作,后一个Bulk是多文档操作,其中Bulk中可以包括Index(Create),Update和Delete。
在6.0.0及其之后的版本中,前3个单文档操作的实现基本都和Bulk操作一致,甚至有些就是通过调用Bulk的接口实现的。估计接下来几个版本后,Index(Create),Update,Delete都会被当做Bulk的一种特例化操作被处理。这样,代码和逻辑都会更清晰一些。
下面,我们就以Bulk请求为例来介绍写入流程。
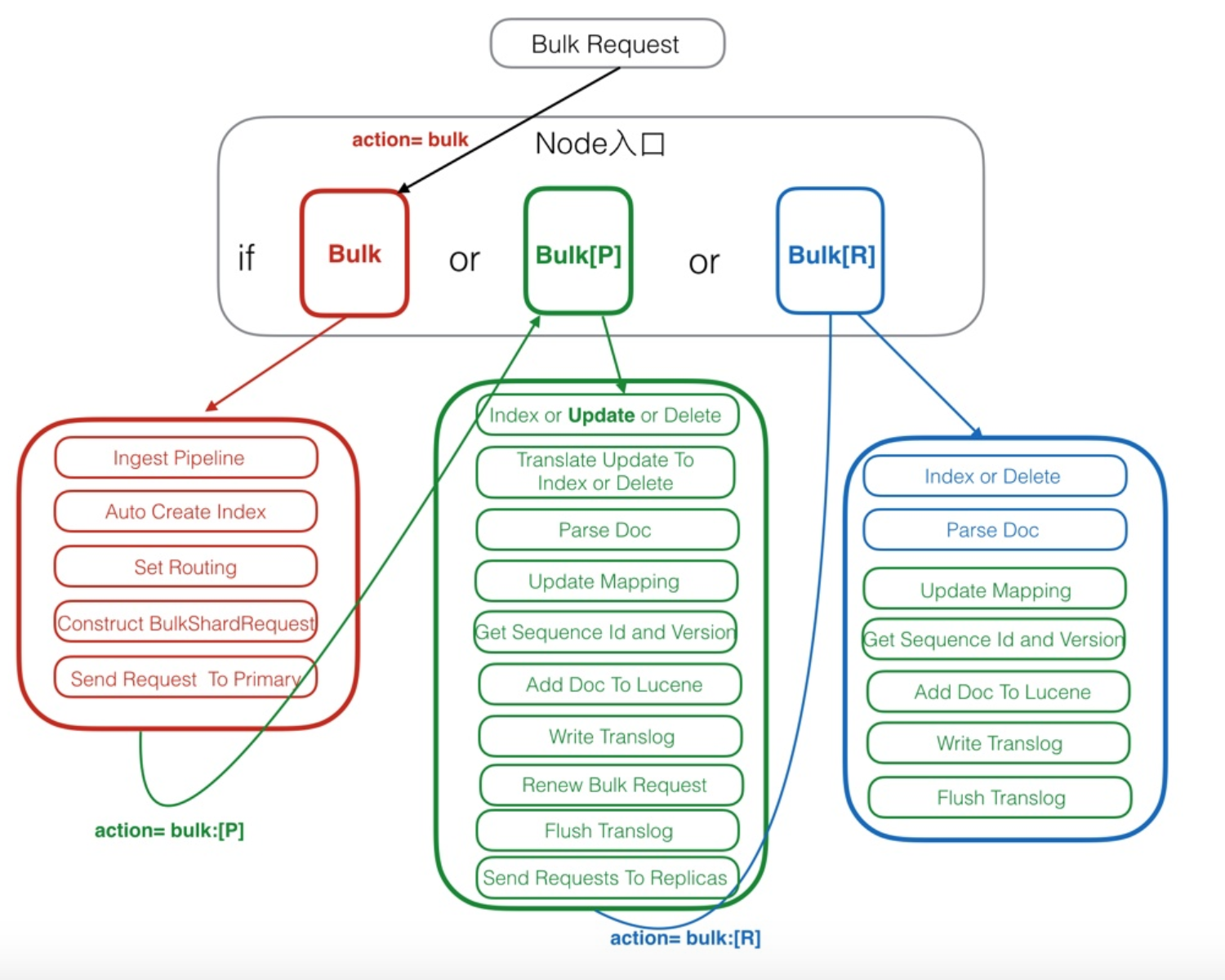
- 红色:Client Node。
- 绿色:Primary Node。
- 蓝色:Replica Node。
3.4.1 Client Node
Client Node 也包括了前面说过的Parse Request,这里就不再赘述了,接下来看一下其他的部分。
- Ingest Pipeline
在这一步可以对原始文档做一些处理,比如HTML解析,自定义的处理,具体处理逻辑可以通过插件来实现。在Elasticsearch中,由于Ingest Pipeline会比较耗费CPU等资源,可以设置专门的Ingest Node,专门用来处理Ingest Pipeline逻辑。
如果当前Node不能执行Ingest Pipeline,则会将请求发给另一台可以执行Ingest Pipeline的Node。
- Auto Create Index
判断当前Index是否存在,如果不存在,则需要自动创建Index,这里需要和Master交互。也可以通过配置关闭自动创建Index的功能。
- Set Routing
设置路由条件,如果Request中指定了路由条件,则直接使用Request中的Routing,否则使用Mapping中配置的,如果Mapping中无配置,则使用默认的_id字段值。
在这一步中,如果没有指定id字段,则会自动生成一个唯一的_id字段,目前使用的是UUID。
- Construct BulkShardRequest
由于Bulk Request中会包括多个(Index/Update/Delete)请求,这些请求根据routing可能会落在多个Shard上执行,这一步会按Shard挑拣Single Write Request,同一个Shard中的请求聚集在一起,构建BulkShardRequest,每个BulkShardRequest对应一个Shard。
- Send Request To Primary
这一步会将每一个BulkShardRequest请求发送给相应Shard的Primary Node。
3.4.2 Primary Node
Primary 请求的入口是在PrimaryOperationTransportHandler的messageReceived,我们来看一下相关的逻辑流程。
- Index or Update or Delete
循环执行每个Single Write Request,对于每个Request,根据操作类型(CREATE/INDEX/UPDATE/DELETE)选择不同的处理逻辑。
其中,Create/Index是直接新增Doc,Delete是直接根据_id删除Doc,Update会稍微复杂些,我们下面就以Update为例来介绍。
- Translate Update To Index or Delete
这一步是Update操作的特有步骤,在这里,会将Update请求转换为Index或者Delete请求。首先,会通过GetRequest查询到已经存在的同_id Doc(如果有)的完整字段和值(依赖_source字段),然后和请求中的Doc合并。同时,这里会获取到读到的Doc版本号,记做V1。
- Parse Doc
这里会解析Doc中各个字段。生成ParsedDocument对象,同时会生成uid Term。在Elasticsearch中,_uid = type # _id,对用户,_Id可见,而Elasticsearch中存储的是_uid。这一部分生成的ParsedDocument中也有Elasticsearch的系统字段,大部分会根据当前内容填充,部分未知的会在后面继续填充ParsedDocument。
- Update Mapping
Elasticsearch中有个自动更新Mapping的功能,就在这一步生效。会先挑选出Mapping中未包含的新Field,然后判断是否运行自动更新Mapping,如果允许,则更新Mapping。
- Get Sequence Id and Version
由于当前是Primary Shard,则会从SequenceNumber Service获取一个sequenceID和Version。SequenceID在Shard级别每次递增1,SequenceID在写入Doc成功后,会用来初始化LocalCheckpoint。Version则是根据当前Doc的最大Version递增1。
- Add Doc To Lucene
这一步开始的时候会给特定_uid加锁,然后判断该_uid对应的Version是否等于之前Translate Update To Index步骤里获取到的Version,如果不相等,则说明刚才读取Doc后,该Doc发生了变化,出现了版本冲突,这时候会抛出一个VersionConflict的异常,该异常会在Primary Node最开始处捕获,重新从“Translate Update To Index or Delete”开始执行。
如果Version相等,则继续执行,如果已经存在同id的Doc,则会调用Lucene的UpdateDocument(uid, doc)接口,先根据uid删除Doc,然后再Index新Doc。如果是首次写入,则直接调用Lucene的AddDocument接口完成Doc的Index,AddDocument也是通过UpdateDocument实现。
这一步中有个问题是,如何保证Delete-Then-Add的原子性,怎么避免中间状态时被Refresh?答案是在开始Delete之前,会加一个Refresh Lock,禁止被Refresh,只有等Add完后释放了Refresh Lock后才能被Refresh,这样就保证了Delete-Then-Add的原子性。
Lucene的UpdateDocument接口中就只是处理多个Field,会遍历每个Field逐个处理,处理顺序是invert index,store field,doc values,point dimension,后续会有文章专门介绍Lucene中的写入。
- Write Translog
写完Lucene的Segment后,会以keyvalue的形式写TransLog,Key是_id,Value是Doc内容。当查询的时候,如果请求是GetDocByID,则可以直接根据_id从TransLog中读取到,满足NoSQL场景下的实时性要去。
需要注意的是,这里只是写入到内存的TransLog,是否Sync到磁盘的逻辑还在后面。
这一步的最后,会标记当前SequenceID已经成功执行,接着会更新当前Shard的LocalCheckPoint。
- Renew Bulk Request
这里会重新构造Bulk Request,原因是前面已经将UpdateRequest翻译成了Index或Delete请求,则后续所有Replica中只需要执行Index或Delete请求就可以了,不需要再执行Update逻辑,一是保证Replica中逻辑更简单,性能更好,二是保证同一个请求在Primary和Replica中的执行结果一样。
- Flush Translog
这里会根据TransLog的策略,选择不同的执行方式,要么是立即Flush到磁盘,要么是等到以后再Flush。Flush的频率越高,可靠性越高,对写入性能影响越大。
- Send Requests To Replicas
这里会将刚才构造的新的Bulk Request并行发送给多个Replica,然后等待Replica的返回,这里需要等待所有Replica返回后(可能有成功,也有可能失败),Primary Node才会返回用户。如果某个Replica失败了,则Primary会给Master发送一个Remove Shard请求,要求Master将该Replica Shard从可用节点中移除。
这里,同时会将SequenceID,PrimaryTerm,GlobalCheckPoint等传递给Replica。
发送给Replica的请求中,Action Name等于原始ActionName + [R],这里的R表示Replica。通过这个[R]的不同,可以找到处理Replica请求的Handler。
- Receive Response From Replicas
Replica中请求都处理完后,会更新Primary Node的LocalCheckPoint。
3.4.3 Replica Node
Replica 请求的入口是在ReplicaOperationTransportHandler的messageReceived,我们来看一下相关的逻辑流程。
- Index or Delete
根据请求类型是Index还是Delete,选择不同的执行逻辑。这里没有Update,是因为在Primary Node中已经将Update转换成了Index或Delete请求了。
Parse Doc
Update Mapping
以上都和Primary Node中逻辑一致。
- Get Sequence Id and Version
Primary Node中会生成Sequence ID和Version,然后放入ReplicaRequest中,这里只需要从Request中获取到就行。
- Add Doc To Lucene
由于已经在Primary Node中将部分Update请求转换成了Index或Delete请求,这里只需要处理Index和Delete两种请求,不再需要处理Update请求了。比Primary Node会更简单一些。
Write Translog
Flush Translog
以上都和Primary Node中逻辑一致。
3.5 最后
上面详细介绍了Elasticsearch的写入流程及其各个流程的工作机制,我们在这里再次总结下之前提出的分布式系统中的六大特性:
- 可靠性:由于Lucene的设计中不考虑可靠性,在Elasticsearch中通过Replica和TransLog两套机制保证数据的可靠性。
- 一致性:Lucene中的Flush锁只保证Update接口里面Delete和Add中间不会Flush,但是Add完成后仍然有可能立即发生Flush,导致Segment可读。这样就没法保证Primary和所有其他Replica可以同一时间Flush,就会出现查询不稳定的情况,这里只能实现最终一致性。
- 原子性:Add和Delete都是直接调用Lucene的接口,是原子的。当部分更新时,使用Version和锁保证更新是原子的。
- 隔离性:仍然采用Version和局部锁来保证更新的是特定版本的数据。
- 实时性:使用定期Refresh Segment到内存,并且Reopen Segment方式保证搜索可以在较短时间(比如1秒)内被搜索到。通过将未刷新到磁盘数据记入TransLog,保证对未提交数据可以通过ID实时访问到。
- 性能:性能是一个系统性工程,所有环节都要考虑对性能的影响,在Elasticsearch中,在很多地方的设计都考虑到了性能,一是不需要所有Replica都返回后才能返回给用户,只需要返回特定数目的就行;二是生成的Segment现在内存中提供服务,等一段时间后才刷新到磁盘,Segment在内存这段时间的可靠性由TransLog保证;三是TransLog可以配置为周期性的Flush,但这个会给可靠性带来伤害;四是每个线程持有一个Segment,多线程时相互不影响,相互独立,性能更好;五是系统的写入流程对版本依赖较重,读取频率较高,因此采用了versionMap,减少热点数据的多次磁盘IO开销。Lucene中针对性能做了大量的优化。